ENAS
Efficient Neural Architecture Search via Parameter Sharing
an RNN controller is trained in a loop: the controller first samples a candidate architecture, i.e. a child model, and then trains it to convergence to measure its performance on the task of desire.
0. 训练
分为两个网络,controller选择设计子网络的架构, 子网络是一个entire网络的一个子图
分为两种参数 RNN的参数\(\theta\) sample网络的\(w\) 分别使用adam 在validation set训练 SGD在training set上面训练
1. RNN cells的设计
controller设计
- 当前节点连接的前一个节点
- 使用什么激活函数(relu, sigmod, tanh, identity)4种
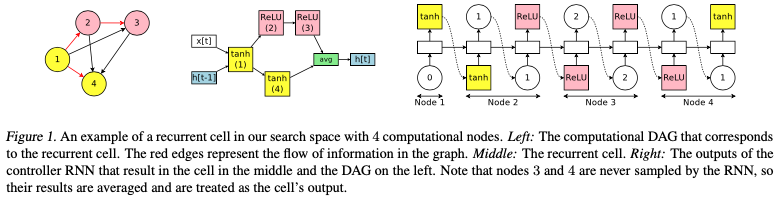
search space:the search space has\(4N × N!\)configurations. In our experiments, N = 12,
2. cnn的设计
controller设计
- 当前节点连接的前一个节点
- 使用什么计算函数(
conv3*3, conv5*5, sep3*3, sep5*5, maxpooling3*3, average pooling3*3)6种
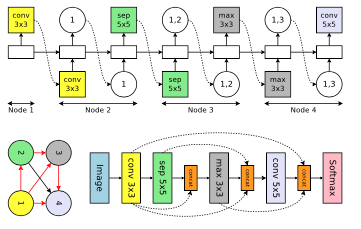
search space: Making the described set of decisions for a total of L times, we can sample a network of L layers. Since all decisions are independent, there are 6L × 2L(L−1)/2 networks in the search space. In our experiments, L = 12, resulting in 1.6 × 1029 possible networks.
3. cnn cells设计
controller设计
- 两个前置连接的节点
- 两条边的计算种类(
identity, sep3*3, spe5*5, avepooling3*3, maxpooling3*3) 5种
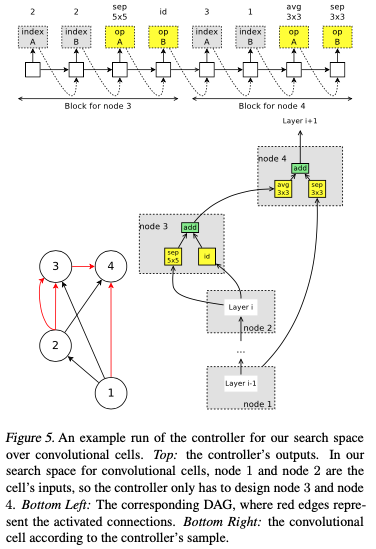
search space: Finally, we estimate the complexity of this search space. At node i (3 ≤ i ≤ B), the controller can select any two nodes from the i − 1 previous nodes, and any two operations from 5 operations. As all decisions are independent, there are (5 × (B − 2)!)2 possible cells. Since we independently sample for a convolutional cell and a reduction cell, the final size of the search space is (5 × (B − 2)!) . With B = 7 as in our experiments, the search space can realize 1.3 × 1011 final networks, making it significantly smaller than the search space for entire convolutional networks