DARTS 可微分架构搜索
1. DARTS
the computation procedure for an architecture (or a cell in it) is represented as a directed acyclic graph. 表示为有向图。
1.1 search space
寻找一个计算cell,作为最后架构的建造模块。学习出来的cell可以叠加起来组成cnn,或者递归连接起来组成rnn。
cell是由N个有序序列node组成的有向无环图。每一条edge都是一个计算。我们假设这个cell有两个input和一个output,对于cnn,它就是前面两个层的输出,对于rnn,它是上个step的state以及这个step的Input。cell的输出是通过对所有中间节点应用reduction得到的。
所有中间节点的计算依赖前置节点。 \[ x^{(j)} = \sum_{i<j}o^{(i,j)}(x^{(i)}) \] 注意zero operation也是可以被允许的edge类型。
1.2 continuous relaxation and optimization
找到每一个操作对应的权重矩阵\(\alpha^{(i,j)}\),这样所有的权重矩阵集合为\(\alpha\),我们将NAS的任务减小为学习一个连续变量的集合\(\alpha\)。
DARTS使用的是GD来优化validation loss。相似的有RL(Learning transferable architectures for scalable image recognition),EA(Hierarchical representations for efficient architecture search)
NAS的目标是找到\(\alpha^*\)使得validation loss\(L_{val}(w^*, \alpha^*)\)最小,\(w^*\)是使得training loss\(L_{train}(w, \alpha^*)\)最小的w。 \[
min_{\alpha} L_{val}(w^*(\alpha), \alpha) \\
s.t. w^*(\alpha) = argmin_w L_{train}(w, \alpha)
\] 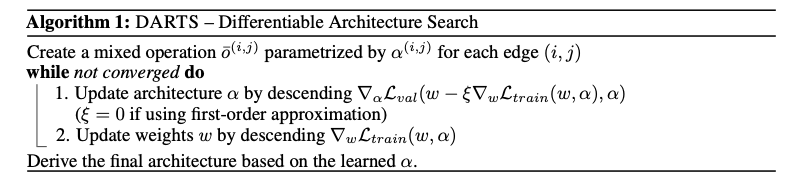
1.3 approximate architecture gradient
\[ \begin{aligned} & \nabla_{\alpha} \mathcal{L}_{v a l}\left(w^{*}(\alpha), \alpha\right) \\ \approx & \nabla_{\alpha} \mathcal{L}_{v a l}\left(w-\xi \nabla_{w} \mathcal{L}_{t r a i n}(w, \alpha), \alpha\right) \end{aligned} \]
运用chain rule。将上式进一步处理。 \[ \triangledown_\alpha L_{val}(w', \alpha - \xi \triangledown^2_{\alpha, w} L_{train}(w, \alpha) \triangledown_{w'}L_{val}(w', \alpha)) \] 其中的\(w' = w - \xi\triangledown_w L_{train}(w, \alpha)\)指的就是one-step forward model。
使用the finite difference approximation(有限差分近似)可以减少复杂度。 \[ \epsilon 是极小量 \\ w^{\pm} = w \pm \epsilon \triangledown_{w'}L_{val}(w', \alpha) \\ \xi \triangledown^2_{\alpha, w} L_{train}(w, \alpha) \triangledown_{w'}L_{val}(w', \alpha)) \approx \frac{\triangledown_\alpha L_{train}(w^{+}, \alpha) - \triangledown_\alpha L_{train}(w^{-}, \alpha)}{2\xi} \] 将\(\xi = 0\)作为一阶近似,将\(\xi > 0\)作为两阶近似。
1.4 deriving discrete architecture
在所有非0的候选operations保留top-k strongest operations,为了使得出的网络可以和现有网络比较,我们选择k=2 for cnn, k=1 for rnn。
为什么不使用zero operation呢?
- 为了与现有模型进行公平的比较,我们需要每个节点恰好有k条非零的引入边
- 因为增加零操作的logits只会影响结果节点表示的规模,由于BN处理的存在而不会而影响最终的分类结果
2. Experiments and results
2.1 architecture search
2.1.1 search for convolutional cells on cifar-10
包含8种operation。 3 × 3 and 5 × 5 separable convolutions, 3 × 3 and 5 × 5 dilated separable convolutions, 3 × 3 max pooling, 3 × 3 average pooling, identity, and zero。
We use the ReLU-Conv-BN order for convolutional operations, and each separable convolution is always applied twice
在整个网络的1/3和2/3处,设立reduce cell。缩小空间分辨率。
2.1.2 searching for recurrent cells for penn treebank
operation的种类:linear transformations followed by one of tanh, relu, sigmoid activations, as well as the identity mapping and the zero operation.
总共12个node,最初的intermediate node是由两个input node通过线性变换,求和,然后传过一个tanh激活函数得到的。
2.2 architecture evaluation
寻找多次,避免初始化的影响 。从cifar-10上迁移到imagenet上,从PTB上迁移到wikitext-2上。