A Comprehensive Survey on Graph Neural Networks
1 简介
欧式数据:图片,文本,语言,视频 非欧式数据:图
图数据不规则,每个图的无序节点大小是可变的,且每个结点有不同数量的邻居结点,因此一些重要的操作如卷积能够在图像数据上轻易计算,但是不适用于图数据,可见图数据的复杂性给现有的机器学习算法带来了巨大的挑战 。此外,现有的机器学习算法假设数据之间是相互独立的,但是,图数据中每个结点都通过一些复杂的连接信息与其他邻居相关,这些连接信息用于捕获数据之间的相互依赖关系,包括,引用,关系,交互。
- Graph attention networks(图注意力网络)
- Graph autoencoders(图自编码)
- Graph generative networks(图生成网络)
- Graph spatial-temporal networks(图时空网络
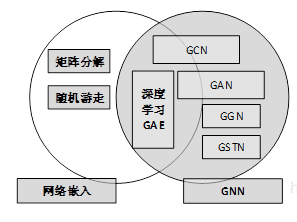
GNN vs 图嵌入
网络嵌入致力于在一个低维向量空间进行网络节点表示,同时保护网络拓扑结构和节点的信息,便于后续的图像分析任务,包括分类,聚类,推荐等,能够使用简单现成的机器学习算法(例如,使用SVM分类)。许多网络嵌入算法都是典型的无监督算法,它们可以大致分为三种类型,即,
- 矩阵分解
- 随机游走
- 深度学习
2 GNN分类及框架
五种类型 GCN GAN GAE GGN GSTN
2.1 分类
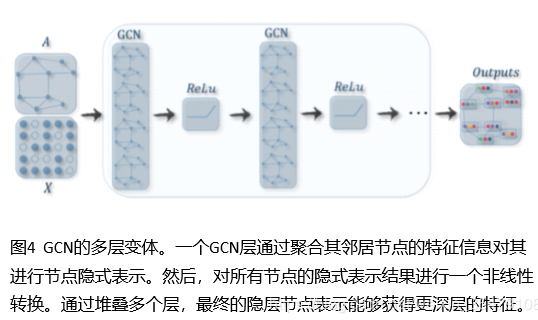
2.1.1 GCN
GCNs将传统数据的卷积算子泛化到图数据,这个算法的关键是学习一个函数\(f\),能够结合\(v_i\)邻居节点的特征\(X_j\)和其本身特征\(X_i\)生成\(v_i\)的新表示.
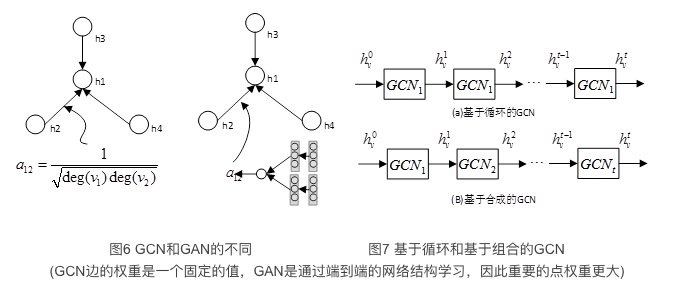
2.1.2 GAN
GAN与GCN类似,致力于寻找一个聚合函数,融合图中相邻的节点,随机游动和候选模型,学习一种新的表示。关键区别是:GAN使用注意力机制为更重要的节点,步或者模型分配更大的权重,权重个网络一起学习。下图展示了GCN和GAN在聚合邻居节点信息时候的不同。
2.1.3 GAE
GAE是一种无监督学习框架,通过编码器学习一种低维点向量,然后通过解码器重构图数据。GAE是一种常用的学习图嵌入的方法,既适用于无属性信息的普通图,还适用于是有属性图。对于普通的图,大多数算法直接预先得到一个邻接矩阵,或者构建一个信息丰富的矩阵,也就是点对互信息矩阵,或者邻接矩阵填充自编码模型,并捕获一阶和二阶信息。对于属性图,图自编码模型利用GCN作为一个构建块用于编码,并且通过链路预测解码器重构结构信息。
2.1.4 GGN
GGN旨在从数据中生成可信的信息,生成给定图经验分布的图从根本上来说是具有挑战性的,主要因为图是复杂的数据结构。为了解决这个问题,研究员探索了将交替形成节点和边作为生成过程的因素,并借助作为训练过程。GGN一个很有前途的应用领域是化合物合成。在化学图中,视原子为节点,化学键为边,任务是发现具有一定化学和物理性质的可合成的新分子。
2.1.5 GSTN
GSTN从时空图中学习不可见的模式,在交通预测和人类活动预测等应用中越来越重要。例如,底层道路交通网络是一个自然图,其中每个关键位置是一个节点,它的交通数据是被连续监测的。通过建立有效的GSTN,能够准确预测整个交通的系统的交通状态。GSTN的核心观点是,同时考虑空间依赖性和时间依赖性。 目前很多方法使用GCNs捕获依赖性,同时使用RNN,或者CNN建模时间依赖关系。
2.2 框架
- node_level 输出用于点回归和分类任务。图卷积模型直接给定节点的潜在表示,然后一个多层感知机或者softmax层用作GCN最后一层。
- Edge-level 输出与边分类和链路预测任务相关。为了预测一条边的标签或者连接强度,附加函数从图卷积模型中提取两个节点的潜在表示作为输入。
- Graph-level 输出和图分类任务相关,池化模块用于池化一个图为子图或者对节点表示求和/求平均,以获得图级别上的紧凑表示。
端到端训练框架:GCN可以在端到端学习框架中进行(半)监督或无监督的训练,取决于学习任务和标签信息的可用性。
- node-level 半监督分类。给定一个部分节点被标记而其他节点未标记的网络,GCN可以学习一个鲁棒的模型,有效地识别未标记节点的类标签。为此,可以构建一个端到端的多分类框架,通过叠加几个图形卷积层,紧跟着一个softmax层。
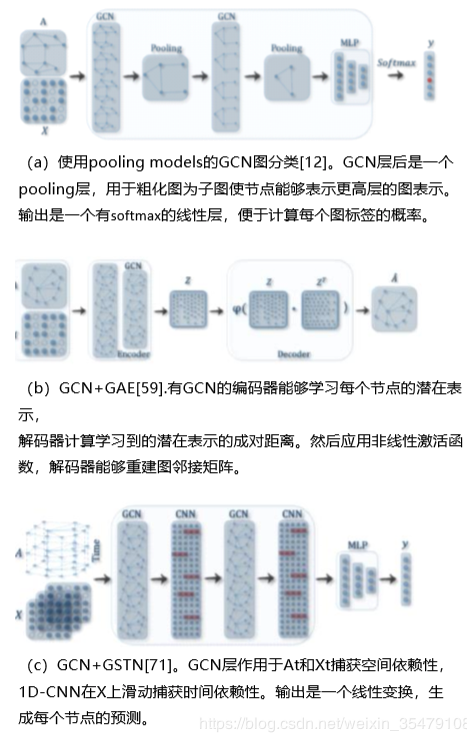
- graph-level 监督分类。给定一个图数据集,图级分类旨在预测整个图的类标签(s),端到端学习框架,通过结合GCN和池化过程实现。具体的,通过GCN获得每个图里每个节点固定维数的特征表示,然后,通过池化求图中所有节点的表示向量的和,以得到整个图的表示。最后,加上多层感知机和softmax层,可以构造一个端到端的图分类。图5(a)展示了这样一个过程。
- 无监督图嵌入。图中没有标签数据的时候,可以在端到端的框架中以无监督的方式学习一种图嵌入。这些算法以两种方式利用边级信息。一种简单的:利用自编码框架,编码器利用GCN将图嵌入到潜在的表示中,解码器利用潜在的表示重构图结构。另一种方式:利用负采样方法,抽取一部分节点对作为负对,图中剩余的节点对作为正对,之后利用逻辑回归层,形成一个端到端的学习框架。
3. 图卷积网络
分为两类
- Spectral-based方法 从图信号处理的角度引入滤波器来定义图卷积,此使图卷积被解释为从图信号中去除噪声。
- Spatial-based的方法 将图卷积表示为来自邻居节点的特征信息的结合
3.1 基于图谱的GCN
\[ x * G g_{\theta}=U g_{\theta} U^{T} x \]
基于谱的GCN都遵循这个定义,不同的是滤波器\(g_{\theta}\)的选择不同。
缺陷 首先,对图的任何扰动都会导致特征基的变化。其次,学习的过滤器依赖于不同领域,这意味着它们不能应用于具有不同结构的图。第三,特征分解需要\(O(N^3)\)计算和\(O(N^2)\)内存
谱方法的一个常见缺点是需要将整个图加载到内存中进行图卷积,这在处理大图时效率不高。
3.2 基于空间的GCN
分为基于循环和基于组合的GCNs。基于循环的GCN使用一个相同的GCL个更新隐含表示,基于组合GCN则使用不同的GCL更新隐含表示。
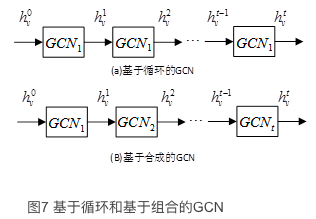
基于循环的空间GCNs 基于递归的方法的主要思想是递归地更新节点的潜在表示,直到达到稳定的不动点。通过对循环函数施加约束、使用门循环单元架构、异步和随机更新节点潜在表示来实现。
基于组合的空间GCNs 基于组合的方法通过叠加多个图的卷积层来更新节点的表示。
3.3 图池模块
3.4 基于光谱和空间的GCNs的对比
- 效率 基于光谱的方法的计算量会随着图的大小急剧增加,因为模型需要同时计算特征向量或者同时处理大图,这就使得模型很难对大图进行并行处理或缩放。基于空间的图方法由于直接对图域的邻居节点进行聚合,所以有潜力处理大图,方法是对一个batch数据计算而不是在整个图上计算。如果邻居节点的数量增加,能够通过采样技术提高效率。
- 通用性 基于光谱的图方法假设图是固定的,因此对新的或者不同的图泛化性能很差。基于空间的方法在每个节点上进行局部图卷积,权值可以很容易地在不同地位置和结构之间共享。
- 灵活性 基于谱的模型只适用于无向图,谱方法用于有向图的唯一方法是u将有向图转换为无向图,因为没有有向图的拉普拉斯矩阵明确的定义。基于空间的模型可以将输入合并到聚合函数中,所以在处理多源输入像是边特征,边方向上更灵活。
因此,近年来,基于空间的方法更受关注。
4. 超GCN网络
GAN GAT GGN GSTN
4.1 图注意力网络GAN
- GAT
- GAAN
- GAM
- 注意力游走
- 深度游走
注意力机制对GNN的贡献分为三个方面,在聚合特征信息的时候对不同的邻居节点分配不同的权值,根据注意力权重集成多个模型,使用注意力权重指导随机游走。尽管将GAT和GAAN归为图的注意网络的范畴,它们也同时是基于空间的GCN。GAT和GAAN的优点是可以自适应学习邻居的重要性权重,如图6所示。但是,由于必须计算每对邻居之间的注意力权重,计算成本和内存消耗迅速增加。
4.2 图自编码
网络嵌入致力于使用神经网络架构将网络顶点在低维向量空间进行表示,图自编码是网络嵌入的一种类型。典型做法是利用多层感知机作为编码器,获得节点嵌入,然后解码器据此重构节点的邻域统计信息,如正点态互信息(positive pointwise mutual information, PPMI)或一阶和二阶近似。近期,研究员探索将GCN[作为编码器,设计图自编码器的时候或结合HCN与GAN,或结合GAN与LSTM。
这些方法都学习节点嵌入,但是DNGR和SDNE只给定拓扑结构,而GAE、ARGA、NetRA和DRNE不仅给定拓扑结构而且给定节点内容特性。图自编码的一个挑战是邻接矩阵的稀疏性,使解码器的正项数远少于负项数。为了解决这个问题,DNGR重构了一个更紧密的矩阵即PPMI矩阵,SDNE对邻接矩阵的零项进行了惩罚,GAE对邻接矩阵中的项进行了加权,NetRA将图线性化为序列。
4.3 图生成网络
图生成网络(GGN)的目标是,在给定一组观察到的图的前提下生成图。很多图生成方法是与特定领域相关的,例如,分子图生成,一些方法是对分子图进行字符串表示建模,叫做SMILES,自然语言处理,以给定的句子为条件生成语义图或者知识图。最近,提出了一些统一的生成方法,一些方法将生成过程看作交替生成节点和边,其他的方法利用生成对抗训练。GGN中的方法或者利用GCN作为构建块,或者使用不同的架构。
对生成的图进行评估仍然是一个难题。与人工合成图像或者音频不同,他们能够直接被人类专家评估,生成的图的质量很难直观检测。MolGAN和DGMG利用外部知识来评估生成分子图的有效性。GraphRNN和NetGAN通过图统计信息(如节点度)评估生成的图形。DGMG和GraphRNN依次生成节点和边缘,MolGAN和NetGAN同时生成节点和边缘。根据[68],前一种方法的缺点是当图变大时,对长序列建模是不现实的。后一种方法的挑战是很难控制图的全局属性。最近一种方法[68]采用变分自编码器通过生成邻接矩阵来生成图形,引入惩罚项来解决有效性约束。然而,由于具有n个节点的图的输出空间为\(n^2\) ,这些方法都不能扩展到大型图。
4.4 图时空网络
图时空网络同时捕获时空图的时空依赖性。时空图具有全局图结构,每个节点的输入随时间变化。例如,在交通网络中,将每个传感器作为一个节点,连续记录某条道路的交通速度,其中交通网络的边由传感器对之间的距离决定。图时空网络的目标是预测未来的节点值或标签,或预测时空图标签。最近的研究探索了单独使用GCNs[72],结GCNs与RNN[70]或CNN[71],以及一种为图结构定制的循环架构[73]。
DCRNN由于利用了循环网络架构能够处理长时间依赖关系。虽然CNN-GCN比DCRNN简单,但是由于他首先实现了1D-CNN,所以在处理时空图上更加高效。ST-GCN将时间流作为图的边,使邻接矩阵的大小呈二次增长。一方面,增加了图卷积层的计算成本。另一方面,为了捕获长期依赖关系,图卷积层必须多次叠加。Structural-RNN通过在相同的语义组共享相同的RNN提高了模型的有效性。但是,需要人类先验知识来划分语义组。